Prey population growth constrained by predators (Lotka-Volterra)
What if a growing population gets eaten by another population?
But population growth can also be curtailed through interactions with another species population, such as a predator. In my area of study, we deal with a lot of herbivorous pests of agricultural systems. Despite the predominance of pesticides as a pest management strategy, there is a growing appreciation that "beneficial" arthropods, such as predators, will suppress pests.
Lotka-Volterra
Most ecologists will have heard the conjugation of Lotka-Volterra in reference to predator-prey dynamics, and here we will have a look at the equations that have become synonymous with their names.
To introduce another population, we require another variable to keep track of it's state (another state variable). Let's go with
As with the prey, the predator population growth
Solving the equations numerically
As these populations depend on each other, both equations are needed to describe how the system changes through time. This is called a system of differential equations. As before, we can use the deSolve R package to numerically solve the situation were
library(tidyverse)
library(deSolve)
parameters <- c(r = 0.3, a = 0.1, b = 0.4, e = 0.5)
state <- c(N = 2, P = 2)
lotka_volterra <- function(t, state, parameters) {
with(as.list(c(state, parameters)), {
dN <- r*N - a*N*P
dP <- e*a*N*P - b*P
list(c(dN, dP))
})
}
times <- seq(0, 100, by = 0.2)
sol = as.data.frame(
ode(y = state, times = times, func = lotka_volterra, parms = parameters)
)
sol2 = gather(sol, species, individuals, -time)
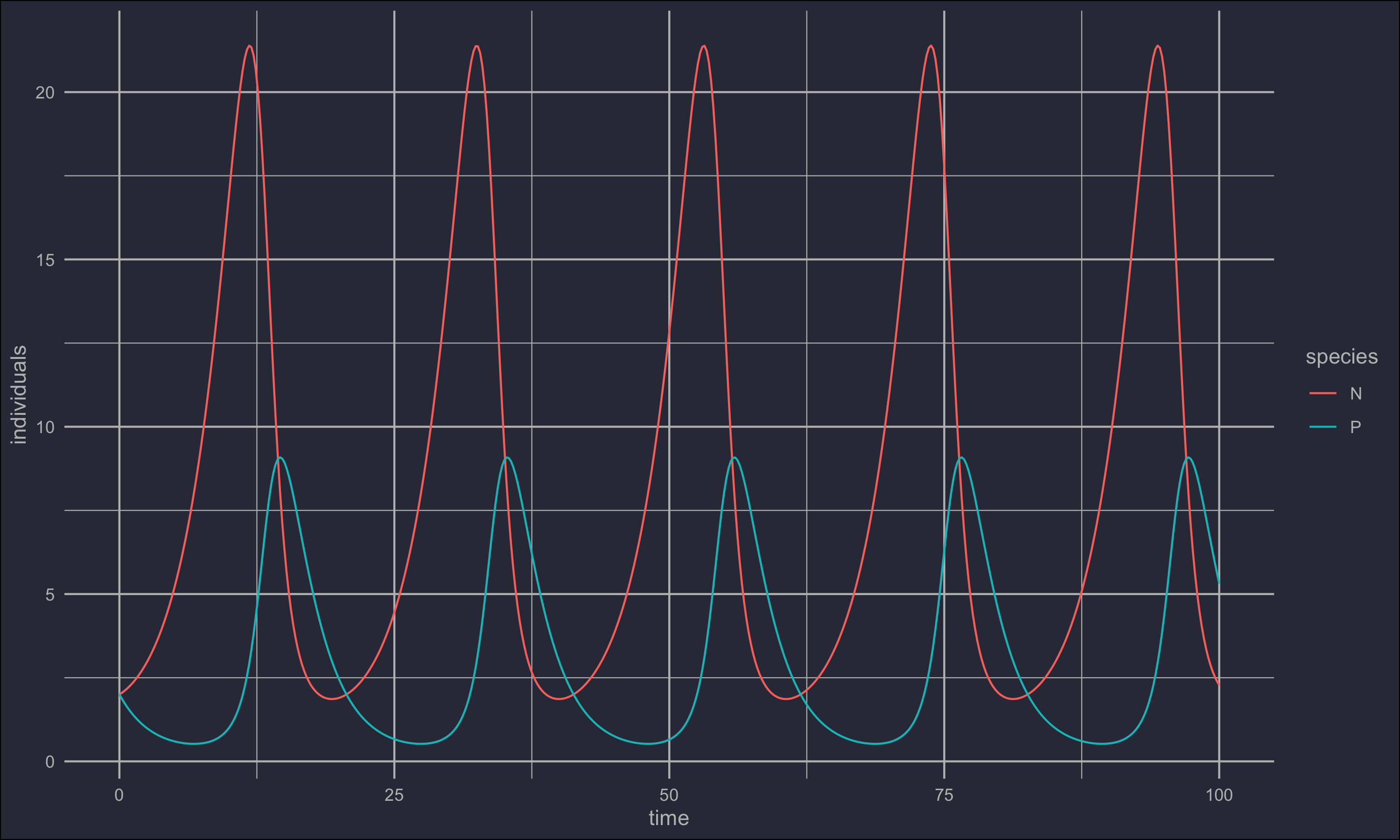
ggplot(sol2) +
geom_line(aes(time, individuals, colour = species))+
theme_minimal() +
theme(
plot.background = element_rect(fill = rgb(.2,.21,.27)),
text = element_text(colour = 'grey'),
axis.text = element_text(colour = 'grey'),
panel.grid = element_line(colour = 'grey')
)
Another way of visualising the solution to the ODE system is by plotting each population on each axis.
ggplot(sol) +
geom_path(aes(N, P), colour = 'red', size = 1)+
theme_minimal() +
theme(
plot.background = element_rect(fill = rgb(.2,.21,.27)),
text = element_text(colour = 'grey'),
axis.text = element_text(colour = 'grey'),
panel.grid = element_line(colour = 'grey')
)
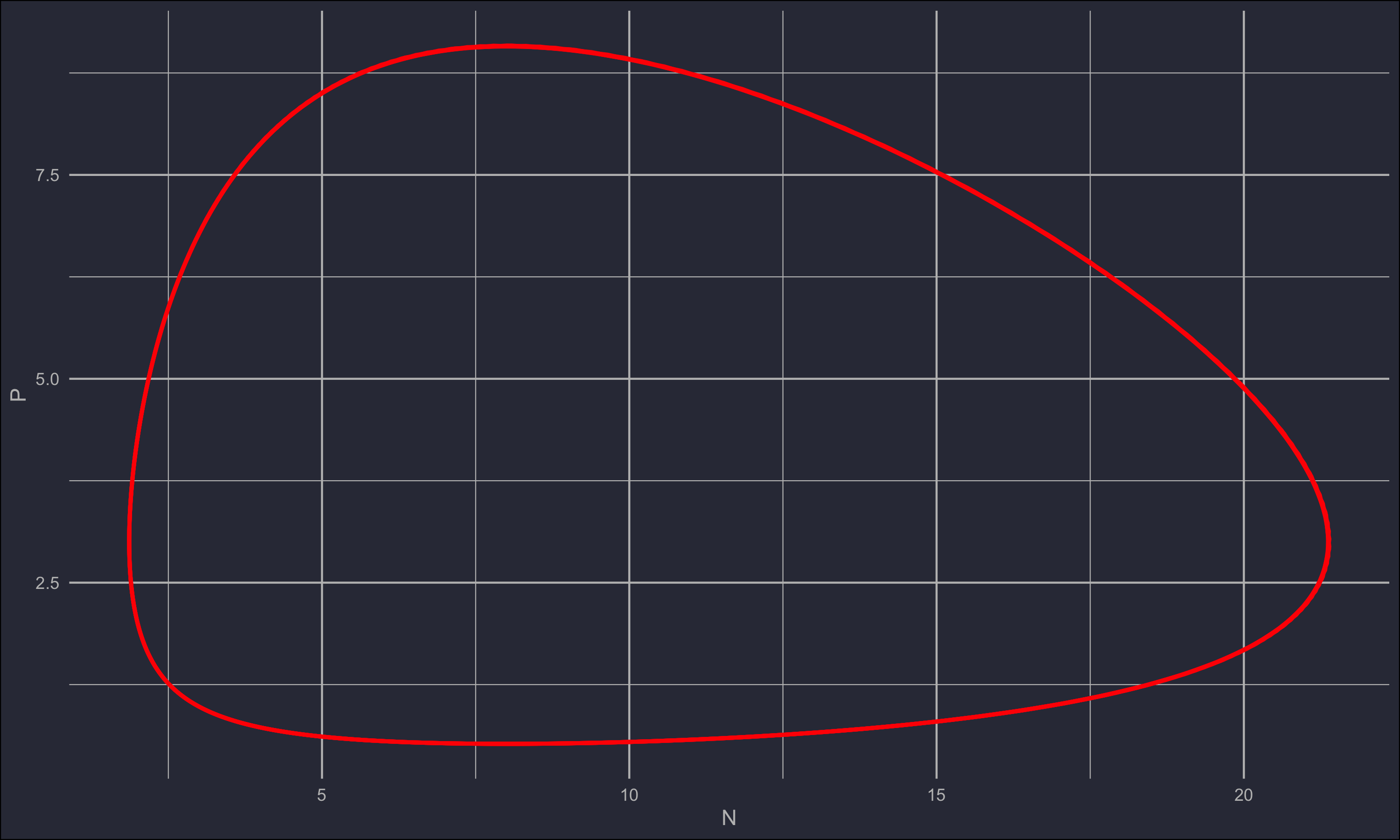
While you may have already guessed it, this plot shows that the population densities are cyclical.
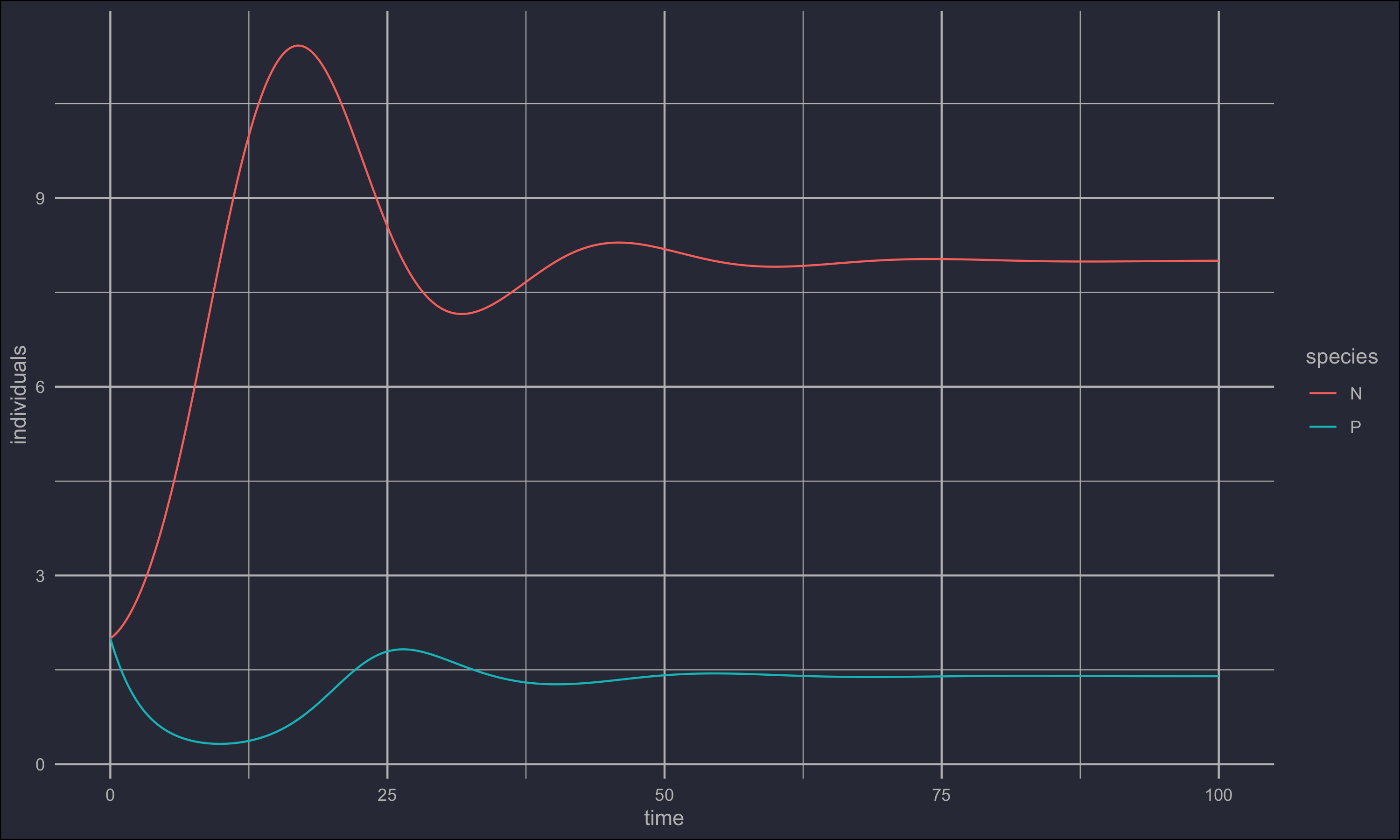
Incorporating logistic growth
Let's now incorporate the logistic growth function in the prey population to see the effect (assuming a carrying capacity of
parameters <- c(r = 0.3, a = 0.1, b = 0.4, e = 0.5, K = 15)
state <- c(N = 2, P = 2)
lotka_volterra_K <- function(t, state, parameters) {
with(as.list(c(state, parameters)), {
dN <- (1 - N/K)*r*N - a*N*P
dP <- e*a*N*P - b*P
list(c(dN, dP))
})
}
times <- seq(0, 100, by = 0.2)
sol = as.data.frame(
ode(y = state, times = times, func = lotka_volterra_K, parms = parameters)
)
soll = gather(sol, species, individuals, -time)
ggplot(soll) +
geom_line(aes(time, individuals, colour = species))+
theme_minimal() +
theme(
plot.background = element_rect(fill = rgb(.2,.21,.27)),
text = element_text(colour = 'grey'),
axis.text = element_text(colour = 'grey'),
panel.grid = element_line(colour = 'grey')
)
And now plotting
ggplot(sol) +
geom_path(aes(N, P, colour = time), size = 1)+
theme_minimal() +
theme(
plot.background = element_rect(fill = rgb(.2,.21,.27)),
text = element_text(colour = 'grey'),
axis.text = element_text(colour = 'grey'),
panel.grid = element_line(colour = 'grey')
) +
scale_color_gradientn(colours = rainbow(9))
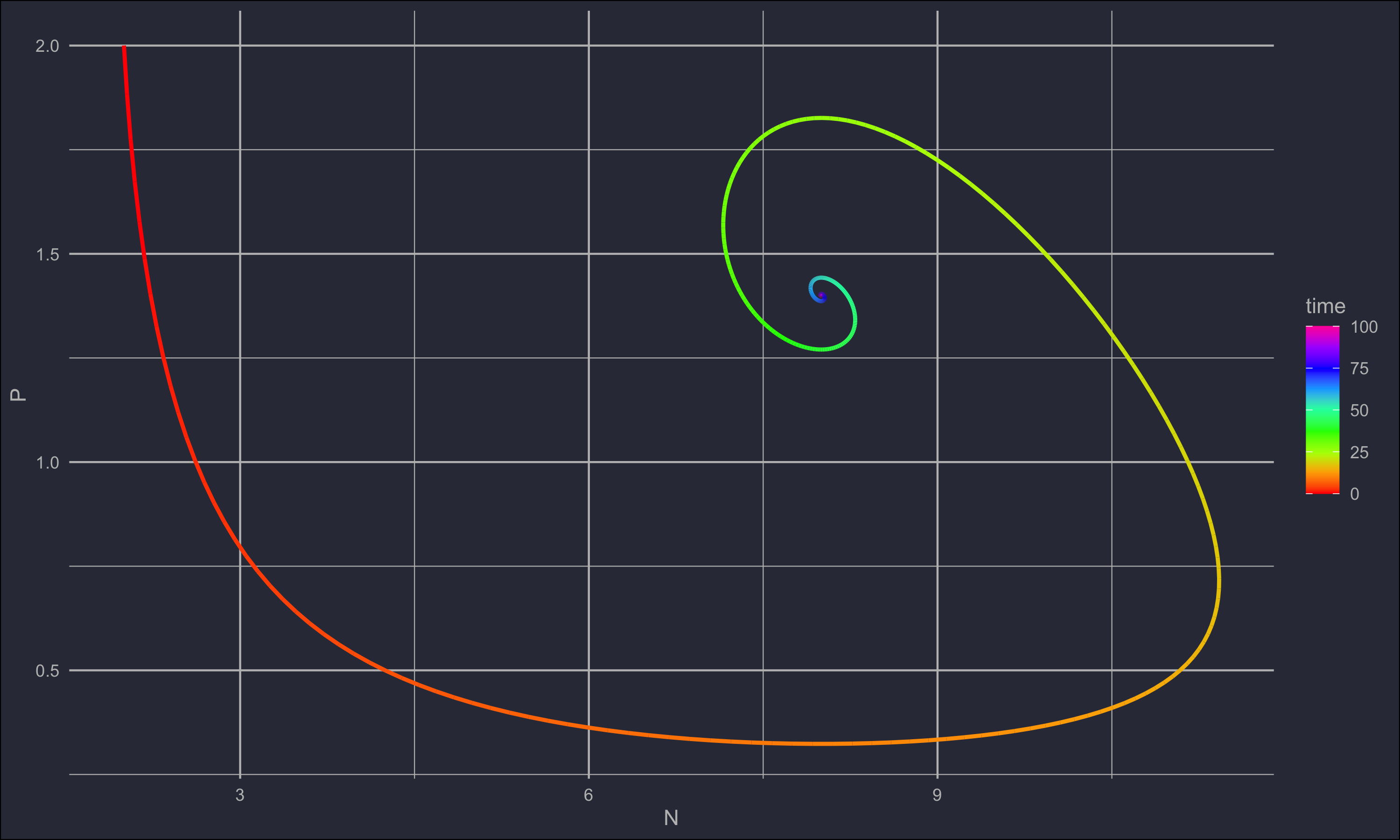
Wow! Now we have dampening and a stable state!
> sol[nrow(sol),]
time N P
501 100 8.002624 1.398892
At first glance, these simulations look kind of reasonable. Our prey population grows exponentially as before, but now reaches a point of decline as the predator population builds up. Population numbers can be cyclical, like in our first example, or may approach a steady state, like in our second example.
One of the side-effects of working with continuous variables like